

一、直流無刷電機的構(gòu)成要素
直流無刷電機的正常運行依賴于多個關(guān)鍵部件的協(xié)同工作,包括直流電源、控制器、電動機以及轉(zhuǎn)子位置檢測裝置。
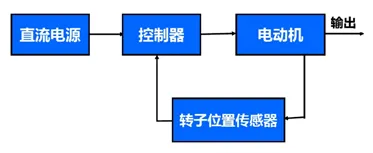
直流電源 :直流電源是整個電機系統(tǒng)能量供給的核心。若輸入為交流電,則必須借助 AC - DC 轉(zhuǎn)換器將其轉(zhuǎn)換為直流電,以滿足電機運行所需的直流電源要求。穩(wěn)定的直流電源是確保電機穩(wěn)定運行的基礎(chǔ)。
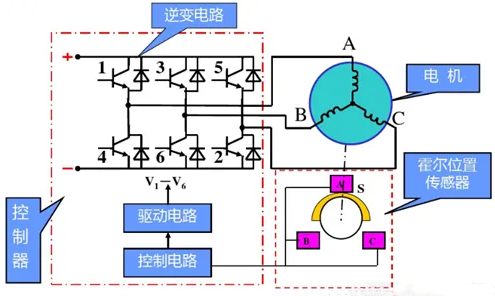
控制器 :控制器作為電機系統(tǒng)的 “大腦”,承擔(dān)著至關(guān)重要的控制任務(wù)。它主要由開關(guān)主電路、驅(qū)動電路和控制電路(MCU)三大部分構(gòu)成。開關(guān)主電路通常由 6 個分立功率器件組成,通過上下臂連接電機,實現(xiàn)對電機線圈電流的控制,可選擇的功率器件類型多樣,包括功率晶體管 GTR、功率場效應(yīng)管 MOSFET、絕緣晶體管 IGBT、可關(guān)斷晶閘管等。驅(qū)動電路則負責(zé)確保功率器件能夠可靠地導(dǎo)通和關(guān)斷。控制電路中的 MCU 運行 PWM(脈沖寬度調(diào)制)信號,精準決定功率管的開關(guān)頻率以及電子換向的時機。
電動機 :作為將電能轉(zhuǎn)換為機械能的核心部件,三相無刷直流電機以其卓越的性能在眾多應(yīng)用場景中備受青睞。其結(jié)構(gòu)和運行特性決定了電機的功率輸出和運行效率。
轉(zhuǎn)子位置傳感器 :為了實現(xiàn)電機的高效運轉(zhuǎn),必須準確獲取轉(zhuǎn)子的位置信息。霍爾傳感器作為常見的位置檢測元件,通常在無刷電機中以三個開關(guān)型的形式出現(xiàn),它們在空間上彼此相差 120 電角度,用以測量轉(zhuǎn)子的位置,并向 MCU 輸出 3 位二進制編碼信號。然而,安裝霍爾傳感器會增加電機的體積和復(fù)雜度,對電機的可靠性和制造過程帶來一定挑戰(zhàn)。因此,無霍爾傳感器的無刷電機控制方法逐漸受到廣泛應(yīng)用。這種無霍爾方案通過檢測定子繞組的反電動勢過零點來確定轉(zhuǎn)子位置。與傳統(tǒng)霍爾方案相比,其顯著優(yōu)勢在于降低成本、減小體積,同時使電機引線從 8 根減少至 3 根,極大簡化了接線和調(diào)試過程。但需要指出的是,由于缺乏霍爾傳感器的直接檢測,在電機靜止或低速運行時,反電動勢較弱,難以準確獲取轉(zhuǎn)子位置信號,導(dǎo)致其在靜止或低速啟動時需采用開環(huán)方式,容易引發(fā)電機振動,這對于負載敏感或負載變化頻繁的場合而言存在一定局限性。
二、直流無刷電機的控制原理
直流無刷電機的控制核心在于依據(jù)轉(zhuǎn)子磁極的位置,對定子線圈實施精確的換向通電。其中,通過 6 個功率器件構(gòu)成的 3 個半橋來操控線圈的 6 拍通電模式,從而生成旋轉(zhuǎn)磁場,這一過程是實現(xiàn)電機高效運行的關(guān)鍵技術(shù)。
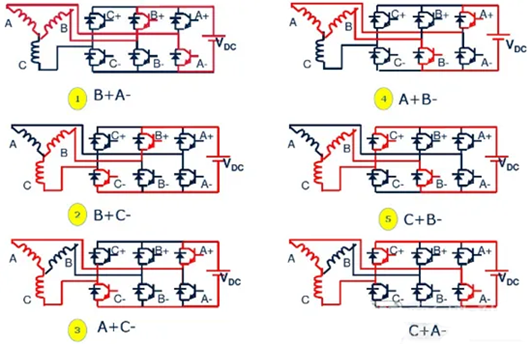
在電機運行過程中,A +、B +、C + 代表上臂功率晶體管,而 A -、B -、C - 則為下臂功率晶體管。通過按照特定順序依次導(dǎo)通這 6 只功率晶體管,可以實現(xiàn)電機 A、B、C 三相繞組的循環(huán)通電,進而產(chǎn)生驅(qū)動電機運轉(zhuǎn)的旋轉(zhuǎn)磁場。例如,按照 B + A -、B + C -、A + C -、A + B -、C + B -、C + A - 的順序?qū)ǎ軌蛐纬身槙r針方向的旋轉(zhuǎn)磁場。若需實現(xiàn)電機反轉(zhuǎn),則只需將功率晶體管的開啟順序反過來即可。在此過程中,必須嚴格注意避免同相的上臂和下臂功率管同時導(dǎo)通,否則將導(dǎo)致上下臂短路,可能損壞功率管。
為了調(diào)節(jié)電機的轉(zhuǎn)速,可以通過改變線圈繞組兩端的電壓來實現(xiàn)。在電機控制系統(tǒng)中,通常采用單片機生成 PWM(脈沖寬度調(diào)制)波形,通過精確控制 PWM 的占空比,從而調(diào)節(jié)線圈繞組的平均電壓,進而實現(xiàn)對電機轉(zhuǎn)速的精準調(diào)控。PWM 調(diào)制方式主要分為全橋調(diào)制和半橋調(diào)制兩種類型。在 120° 導(dǎo)通期間,若對功率逆變橋的上橋和下橋均采用 PWM 方式驅(qū)動,則稱為 “全橋調(diào)制”。而如果在 120° 導(dǎo)通期間,僅對功率逆變橋的上橋(或下橋)采用 PWM 方式驅(qū)動,而下橋(或上橋)保持恒通,則為 “半橋調(diào)制”。
全橋調(diào)制模式下,MOS 管的開關(guān)頻率大約是半橋調(diào)制方式的兩倍,這使得全橋調(diào)制的損耗相對較大,因此在實際應(yīng)用中較少采用。相比之下,半橋調(diào)制更為常用,并且根據(jù)不同的應(yīng)用場景和電路需求,半橋調(diào)制又衍生出多種方式,如 H - PWM - L - ON(在 120° 導(dǎo)通區(qū)間內(nèi),上橋臂 MOS 管采用 PWM 調(diào)制,下橋臂 MOS 管保持恒通)、H - ON - L - PWM(在 120° 導(dǎo)通區(qū)間內(nèi),上橋臂 MOS 管恒通,下橋臂 MOS 管采用 PWM 調(diào)制)、PWM - ON(前 60° 采用 PWM 調(diào)制,后 60° 恒通)、ON - PWM(前 60° 恒通,后 60° 采用 PWM 調(diào)制)等。每種調(diào)制方式都具有其獨特的特點,因此在實際應(yīng)用中,需要根據(jù)具體的應(yīng)用場景和電路配置,精心選擇最為合適的控制策略,以實現(xiàn)電機系統(tǒng)的最佳性能表現(xiàn)。
〈烜芯微/XXW〉專業(yè)制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以直接聯(lián)系下方的聯(lián)系號碼或加QQ/微信,由我們的銷售經(jīng)理給您精準的報價以及產(chǎn)品介紹
聯(lián)系號碼:18923864027(同微信)
QQ:709211280